Key Concepts & Definitions
- Scalars
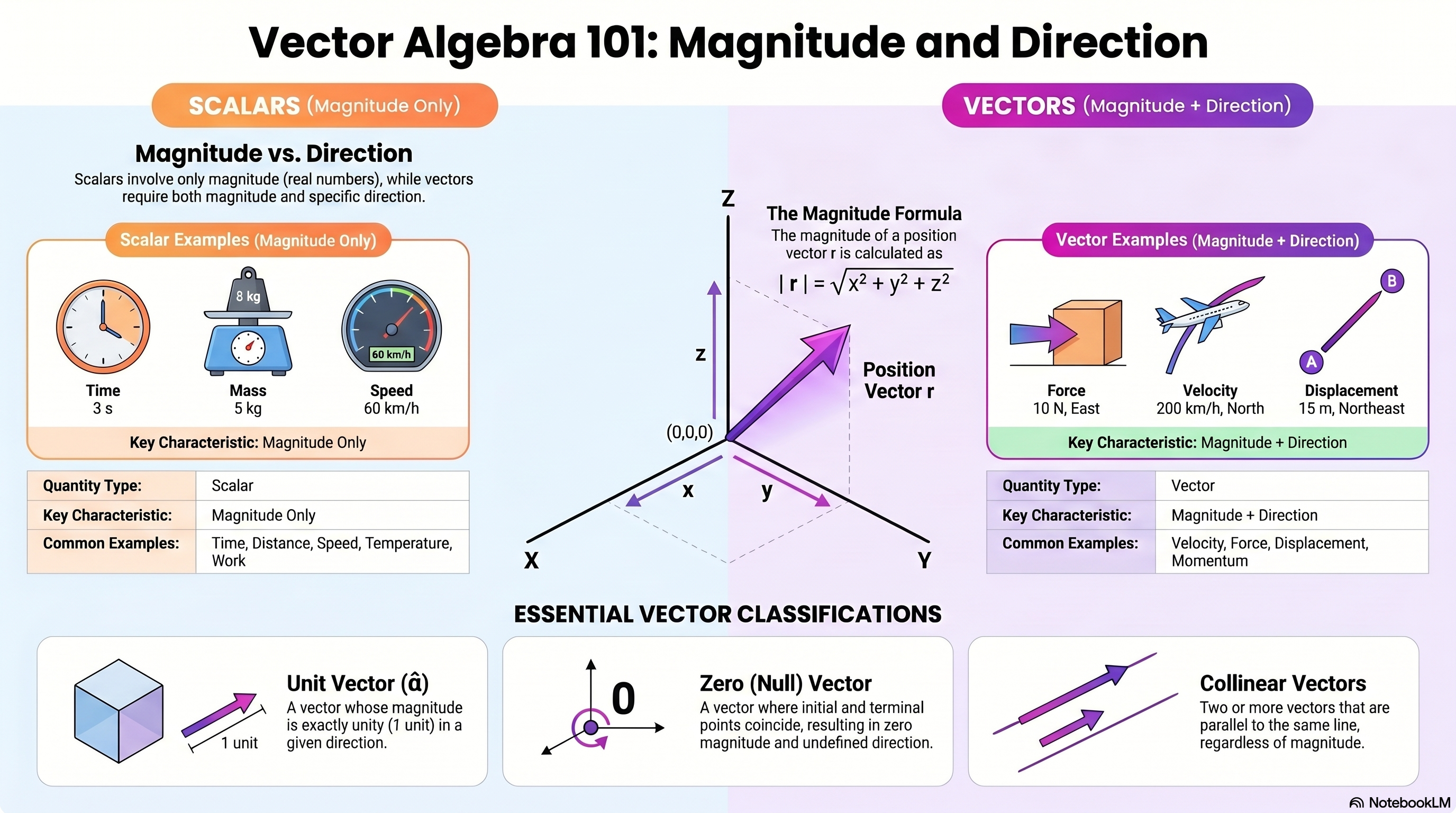
- Quantities that involve only a magnitude (a real number). Examples: length, mass, time, distance, speed, area, volume, temperature, work, money, voltage, density, resistance.
- Vectors
- Quantities that have both magnitude and a specific direction. Examples: displacement, velocity, acceleration, force, weight, momentum, electric field intensity.
- Directed Line Segment
- A straight line segment with an arrowhead prescribing one direction. It has an initial point (start) and a terminal point (end), and acts as a geometric representation of a vector AB⃗\vec{AB}AB. The distance between these points is its magnitude, denoted as ∣AB⃗∣|\vec{AB}|∣AB∣ or ∣a⃗∣|\vec{a}|∣a∣.
- Position Vector
- For a point P(x,y,z)P(x,y,z)P(x,y,z) in a 3D right-handed rectangular coordinate system with origin O(0,0,0)O(0,0,0)O(0,0,0), the vector OP⃗\vec{OP}OP is the position vector r⃗\vec{r}r of point P. Its magnitude is given by the distance formula ∣r⃗∣=x2+y2+z2|\vec{r}| = \sqrt{x^2+y^2+z^2}∣r∣=x2+y2+z2.
- Direction Cosines & Ratios
- A vector r⃗\vec{r}r makes direction angles α,β,γ\alpha, \beta, \gammaα,β,γ with the positive x,y,zx, y, zx,y,z axes respectively. Their cosines (l=cosα,m=cosβ,n=cosγl = \cos\alpha, m = \cos\beta, n = \cos\gammal=cosα,m=cosβ,n=cosγ) are the direction cosines. Any numbers a,b,ca, b, ca,b,c proportional to the direction cosines are called direction ratios.JEE TIPThe relation l2+m2+n2=1l^2+m^2+n^2=1l2+m2+n2=1 is strictly true, but in general, a2+b2+c2≠1a^2+b^2+c^2 \neq 1a2+b2+c2=1.
- Types of Vectors
- Zero (Null) Vector (0⃗\vec{0}0): Initial and terminal points coincide. It has zero magnitude and an arbitrary/undefined direction. Unit Vector: A vector with a magnitude of unity (1 unit). The unit vector in the direction of a⃗\vec{a}a is denoted as a^\hat{a}a^. Coinitial Vectors: Two or more vectors starting from the exact same initial point. Collinear Vectors: Two or more vectors that are parallel to the same line, irrespective of their individual magnitudes or directions. Equal Vectors: Two vectors a⃗\vec{a}a and b⃗\vec{b}b with identical magnitude and direction, regardless of where their initial points are located. Negative of a Vector: Same magnitude as the given vector, but the exact opposite direction (BA⃗=−AB⃗\vec{BA} = -\vec{AB}BA=−AB). Free Vectors: Vectors that can be subjected to parallel displacement without altering their magnitude and direction.
Addition of Vectors & Section Formula
- Triangle Law of Vector Addition: If a displacement goes from A to B (), and then B to C (), the net displacement is . When the sides of a triangle are taken in order, their resultant is zero ().
- Parallelogram Law: If two vectors are represented by the two adjacent sides of a parallelogram, their sum is represented in magnitude and direction by the diagonal passing through their common initial point.
- Properties of Vector Addition:
- Commutativity: .
- Associativity: .
- Additive Identity: .
- Components of a Vector: Vectors can be resolved along axes using unit vectors . , where are scalar components and are vector components.
- Vector Joining Two Points: Directed from to is .
- Section Formula: Let points P and Q have position vectors and . A point R dividing the line segment PQ in ratio has the position vector:
- Internally: .
- Externally: .
- Midpoint: .
Scalar (Dot) Product & Projections
- Definition: The scalar product of non-zero vectors and is , where is the angle between them.
- Conditions: If or is zero, is undefined, and . for non-zero vectors iff they are perpendicular.
- Properties:
- Commutativity: .
- Distributivity: .
- Scalar Multiplication: .
- Orthogonal Unit Vectors: and .
- Component Form: .
- Projection:
- The projection (scalar) of on a directed line with unit vector is .
- The projection of on is .
- The projection vector of on is .
- Inequalities:
- Cauchy-Schwarz Inequality: .
- Triangle Inequality: .JEE TIPEquality holds only if vectors are collinear and have the same direction.
Vector (Cross) Product & Areas
- Definition: The vector product is . Here, is a unit vector perpendicular to both and , forming a right-handed system (thumb points to when fingers curl from to ).
- Conditions: If either vector is zero, . For non-zero vectors, iff and are parallel/collinear.
- Properties:
- Non-Commutative: .
- Distributivity: .
- Orthogonal Unit Vectors: . Following the right-hand rule: .
- Determinant Form: .
- Geometrical Applications (Areas):
- Area of a Triangle with adjacent sides and is .
- Area of a Parallelogram with adjacent sides and is .
Advanced Vector Products (JEE Focus)
(These concepts frequently appear in JEE Advanced coordinate geometry and vector calculus)
- Scalar Triple Product (STP): Denoted as .
- Geometrical Meaning: Represents the volume of a parallelepiped with coterminous edges . Volume of a tetrahedron is .
- Coplanarity: Three vectors are strictly coplanar if and only if .
- Cyclic Property: . Swapping any two adjacent vectors flips the sign: .
- Vector Triple Product (VTP): .
- JEE TIPMemorize this as the "BAC - CAB" rule. The resulting vector lies entirely in the plane formed by and , and is perpendicular to .
- Lagrange’s Identity: . This relates the dot and cross product magnitudes and is exceptionally powerful for simplifying complex expressions in JEE Advanced.
Formulae, Equations & Units
- Magnitude: . (Unit: determined by physical context, e.g., meters).
- Unit Vector Direction: . (Unitless direction indicator).
- Collinearity proportionality: For , .
- Angle formula (Dot Product): .
- Angle formula (Cross Product): .
Conditions & Limitations
- Angle boundaries: The angle between vectors is strictly constrained to .
- Division by vectors: Mathematical division by a vector is undefined. Never write . You cannot perform scalar algebraic "cancellation" of vectors across products.
- Zero Vector Denominators: Evaluating a unit vector is impossible if because division by zero magnitude is undefined.
- Triangle Area Applicability: The formula requires vectors and to represent adjacent sides co-originating from a common vertex.
⚠️ COMMON MISCONCEPTIONS & SIGN CONVENTIONS
- Collinear vs Identical Line of Action: Students assume collinear vectors must physically lie on the same straight line. In vector algebra, we use "free vectors," so parallel vectors are mathematically classified as collinear regardless of their origin.
- Cross Product Commutativity Trap: Carelessly writing causes fatal sign errors. Reversing the order strictly reverses the direction via the right-hand rule: .
- Direction Ratios vs Direction Cosines: Direction ratios can be any real numbers proportional to the vector's coordinates. Students falsely apply . This sum is ONLY equal to 1 for normalized Direction Cosines ().
- Triangle Law Head-to-Tail Traps: Placing vectors tail-to-tail to add them geometrically is incorrect for the Triangle Law (which requires head-to-tail). Tail-to-tail placement invokes the Parallelogram Law. When traversing a closed triangle sequentially, , NOT .
- Scalar vs Vector Projections: Always note whether the question asks for the "projection" (a scalar length, ) or the "projection vector" (a vector quantity, ).
Previous Year JEE Topics
- Orthogonal Projections: Finding vectors in the plane of two given vectors that are perpendicular to a third.
- Simultaneous Vector Equations: Solving for unknown vectors using systems like and using the Vector Triple Product.
- Coplanarity Constraints: Using the Scalar Triple Product to find unknown constants in coordinate vertices.
- Area and Volume Geometry: Given diagonals (instead of sides), using to compute the area of a generic parallelogram.
Top 10 JEE MCQ Traps
- Misconception: applies to ANY scalar components of a vector Correct Understanding: It strictly applies ONLY to direction cosines () which are derived from a unit vector.
- Misconception: If , then Correct Understanding: You cannot cancel . The equation actually means . Thus, either , , OR is strictly perpendicular to the vector .
- Misconception: If , then either or Correct Understanding: This also happens if the non-zero vectors are parallel/collinear ( or ).
- Misconception: The Vector Cross Product is associative: Correct Understanding: Cross product is NOT associative. These represent entirely different planes in space (use the BAC-CAB rule to expand).
- Misconception: The area of a parallelogram is always Correct Understanding: This is true if and are adjacent sides. If and are the diagonals, the area is .
- Misconception: The projection of on has in the denominator Correct Understanding: The vector being projected onto forms the denominator and direction. Projection is .
- Misconception: When finding the angle between two vectors geometrically, you can use the angle formed when they are arranged head-to-tail Correct Understanding: The angle is strictly defined as the angle between their divergent paths when placed tail-to-tail (coinitial).
- Misconception: If , the vectors are collinear Correct Understanding: Squaring both sides shows , meaning . The vectors are perpendicular, not collinear.
- Misconception: Volume of a tetrahedron is the same as the Scalar Triple Product Correct Understanding: The STP gives the volume of a parallelepiped. For a tetrahedron defined by adjacent edges , the volume is exactly .
- Misconception: is equal to Correct Understanding: Vectors cannot be algebraically squared like scalars in cross-multiplication. By Lagrange's Identity, .